Video Presentation
Abstract
Bimanual manipulation is imperative yet challenging for robots to execute complex tasks, requiring coordinated collaboration between two arms. However, existing methods for bimanual manipulation often rely on costly data collection and training, struggling to generalize to unseen objects in novel categories efficiently. In this paper, we present Bi-Adapt, a novel framework designed for efficient generalization for bimanual manipulation via semantic correspondence. Bi-Adapt achieves cross-category affordance mapping by leveraging the strong capability of vision foundation models. Fine-tuning with restricted data on novel categories, Bi-Adapt exhibits notable generalization to out-of-category objects in a zero-shot manner. Extensive experiments conducted in both simulation and real-world environments validate the effectiveness of our approach and demonstrate its high efficiency, achieving a high success rate on different benchmark tasks across novel categories with limited data.

Real-world Demo
Simulation Experiment
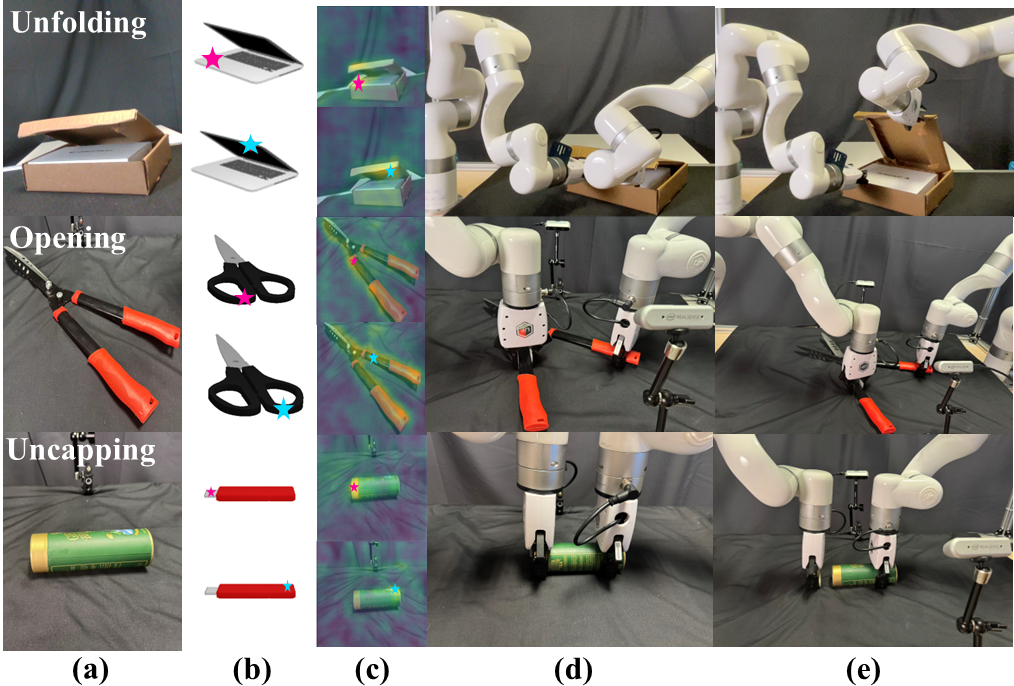
Visualization of manipulation results across tasks
Real World Experiment
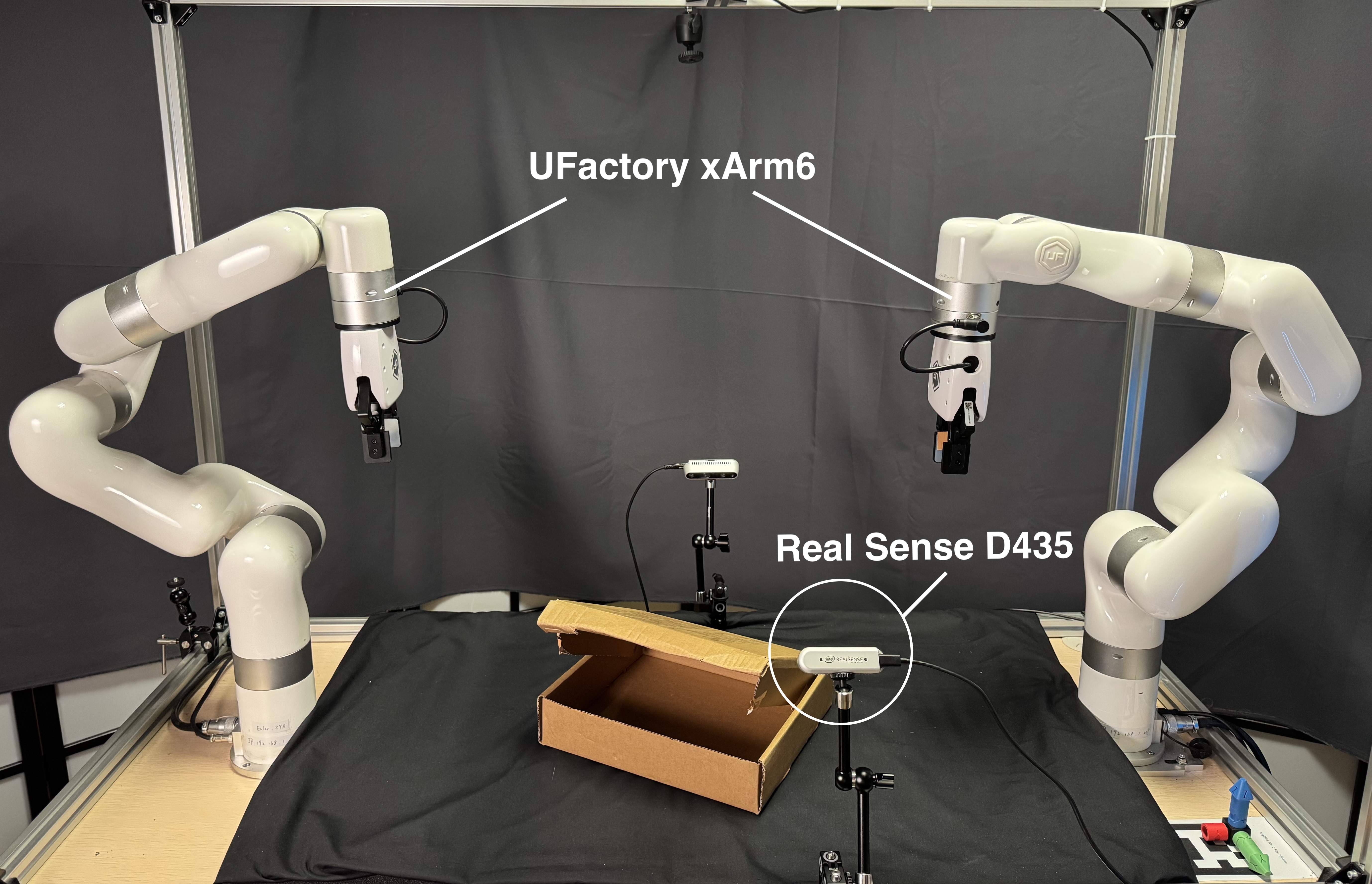
Robot Setup
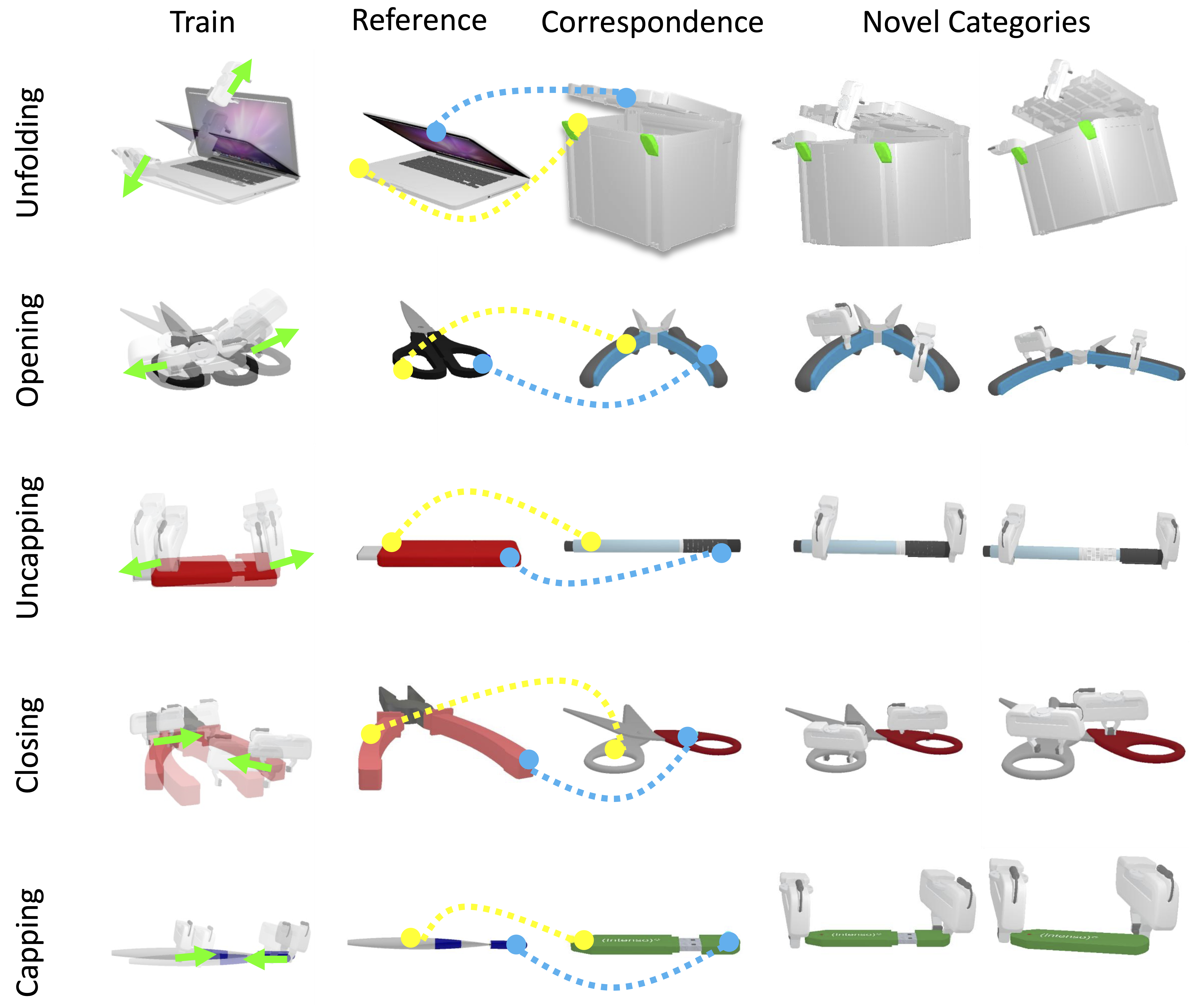
Generalization of Adaptation

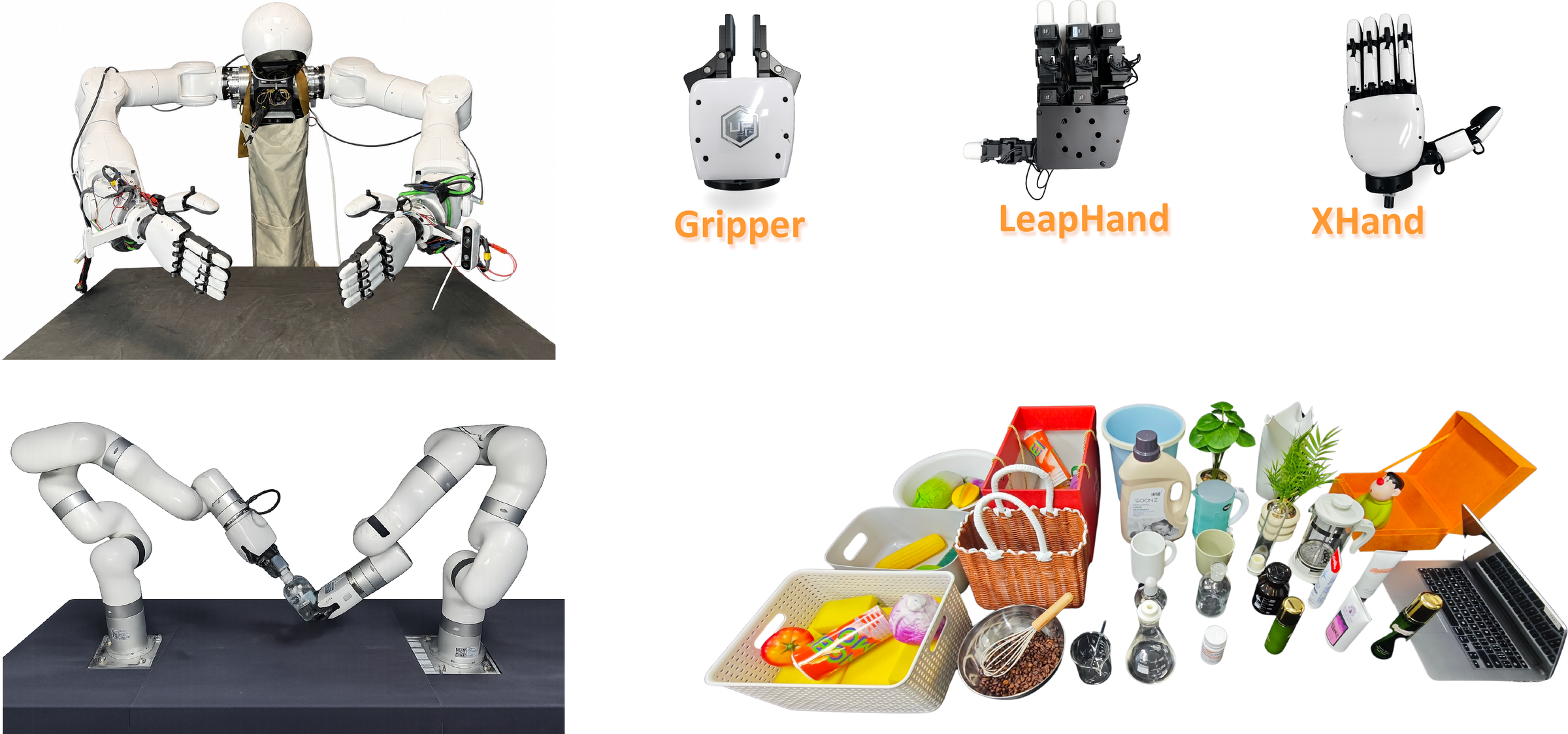
Overview of Diverse Tasks with Cross-Embodiment
Generalization

BibTeX
@inproceedings{zhou2026biadapt,
title = {{Bi-Adapt}: Few-shot Bimanual Adaptation for Novel Categories of 3D Objects via Semantic Correspondence},
author = {Zhou, Jinxian and Wu, Ruihai and Liu, Yiwei and Hou, Yiwen and Zhou, Xunzhe and Yu, Checheng and Zhong, Licheng and Shao, Lin},
booktitle = {2026 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2026},
eprint = {2602.08425},
archivePrefix = {arXiv},
primaryClass = {cs.RO}
}